Category Archives: DCC
Moving Away from RaPi
Overall, I’ve enjoyed my experiences with the RaspberryPi’s I was using for computer control and decoder programming. They aren’t fast, but they were cheap and there was a lot of info on the net about getting them running with JMRI. But…
Pulsed smoke
I’ve been meaning to post a video of this for a while…
Raspberry Pi’s
I set up a RaspberryPi to run on my workbench.
Here’s the (neat!) login screen when remoting in/to the shell:

And here’s the GUI

Continue reading Raspberry Pi’s
Decoder choices
When it comes to DCC, the options are almost unlimited. This is especially true of decoders, the electronics that live in locomotives and control the motor(s), lights, and other functions. You can find simple large scale decoders for under $50, or full-featured ones for over $200. Some have more functions, some sounds, some have features like special lighting effects or control of a fan-driven smoke generator. Obviously, those that have more features cost more…
Continue reading Decoder choices
JMRI Pi
I’m now set up to run my trains using JMRI. It’s a cool Java-based interface that allows you to send commands to a DCC command station (like my NCE setup) to control trains. All it took was a $30 Raspberry Pi computer, a $10 WiFi dongle, and a $10 USB-to-serial cable.
Here’s the (neat!) shell of the layout Pi:

Here’s the desktop:

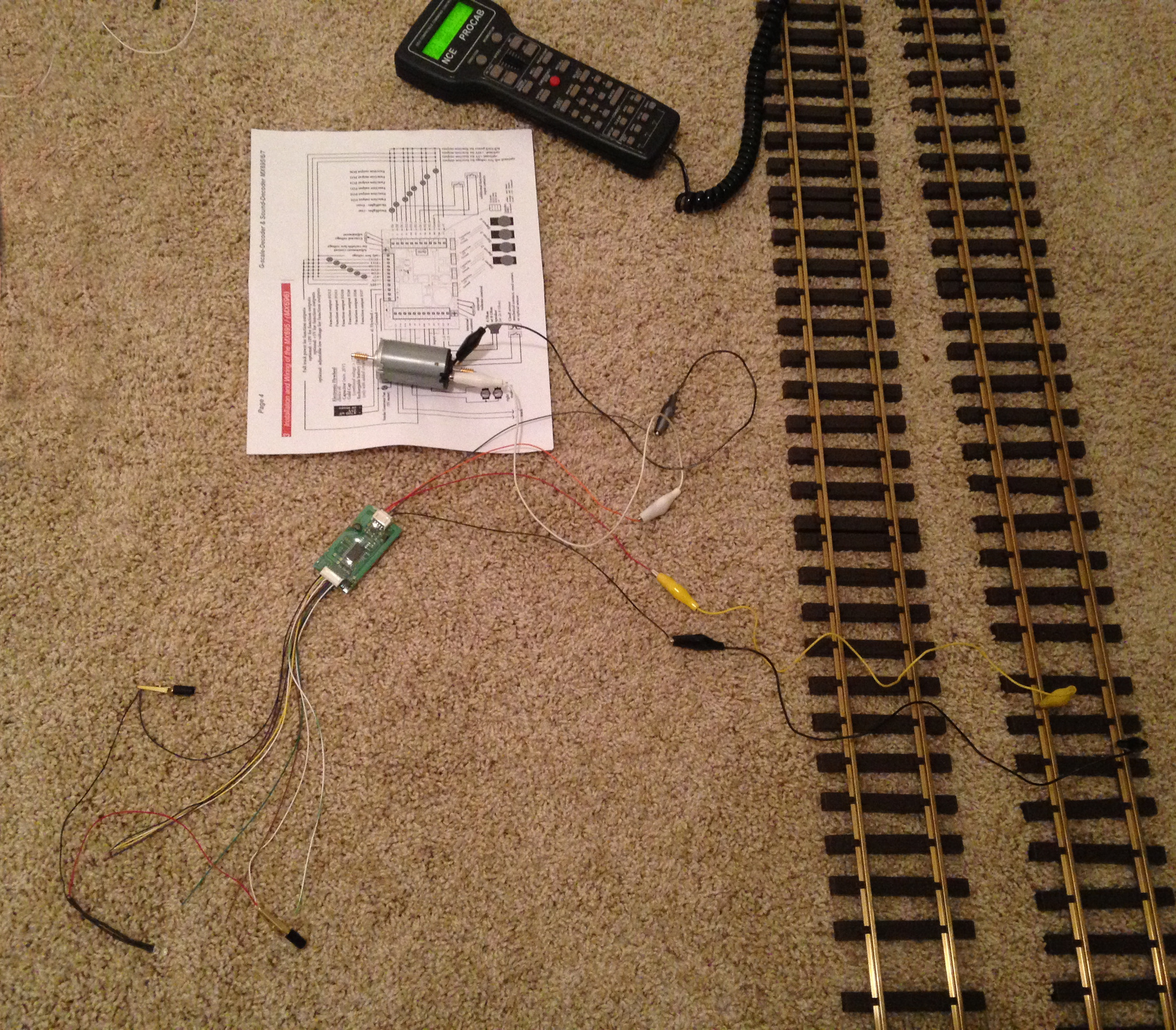
Decoder testing
Here’s my decoder testing setup–just on the carpet in my office.
JMRI – What it is and why it’s good
JMRI is a handy tool for anyone running DCC. Essentially, it’s a computer interface for programming DCC decoders and controlling DCC command stations.
Continue reading JMRI – What it is and why it’s good
NCE DCC
Here’s the NCE DCC system I bought, the PH-10R. It’s pretty nice–you get a 10amp booster, command station, and a radio unit so the cab can be used wirelessly. I think that it will be good for running the trains I want.

Running the Mallet
Here’s my LGB 2085D Mallet pulling a rake of HSB coaches. Near the end of the video, you can clearly see the pulsed smoke until timing the smoke puffs to the sound card chuffs. Pretty cool
Of course, you’ll have to ignore the moon-like landscape in the background, as I’m all out of gardening funds for the moment 🙂
Working on RaspberryPi
One of my projects is to add JMRI programming (and possibly control through WiFi-enabled smartphones) to the track.
![]()
I recently built a new RaspberryPi with a serial board and am testing JMRI. It’s a little slow, but definitely usable. If I switch my RaspbianOS to headless, I think that would fix most of the lag.